


ST-Servo技術製品
モーションコントロール.comの製品情報は、クローズドループステッピングサーボシステムのST-Servoシリーズになります。また、各種カスタマイズ対応を致します。
| <ST-Servo シリーズ> | <2相ステッピングモータ用 マイクロステップドライバ> |
<DCサーボドライバ> | ||
クローズドループステッピングサーボシステム - ST-Servo SPL

ST-Servo SPLは、超小型で高性能なクローズドループ制御ステッピングサーボシステムです。
位置・速度・トルク制御に加え、押し当て制御にも対応。
ドライバはパルス列入力に対応し、RS485通信や自動プログラム運転機能を備えているため、幅広い装置制御に活用できます。
モータとドライバのセット品として提供しており、導入も容易です。
特徴
特徴1クローズドループ型ステッピングシステム
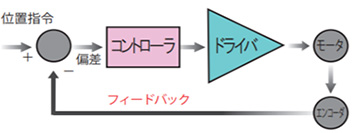
当社コア技術であるサーボ制御技術でエンコーダ付ステッピングモータをクローズドループ制御する事で、ステッピングモータの決定である脱調、乱調、共振、騒音現象を大幅抑制。これまでのステッピングモータの領域を超えるクローズドループ型ステッピングシステム。
高額なACサーボドライバと同じように、位置制御、速度制御、トルク制御、押し当て制御(位置、速度)が可能。
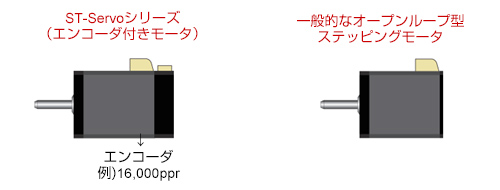
一般的なオープンループ型ステッピングシステム
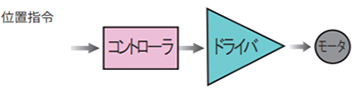
弊社 クローズドループ型ステッピングシステム
特徴2トルク制御、押し当て制御(位置、速度)も可能
位置制御、速度制御、押し当て制御、トルク制御ができます。それぞれの制御モードへの切り替えも瞬時にできますのでお客様の装置に最適の制御ができます。
トルク制御
押し当て制御(位置)
押し当て制御(速度)
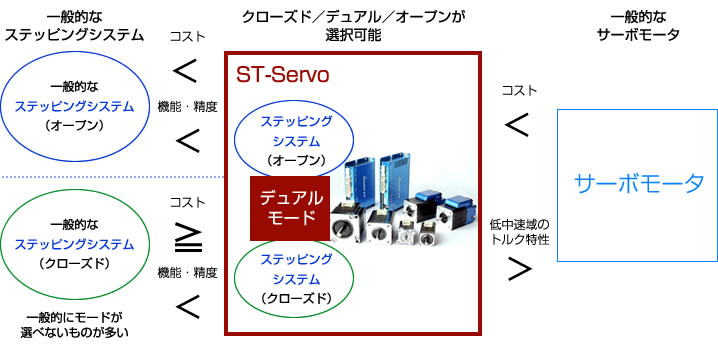
特徴3クローズド/デュアル/オープンが選択可能
クローズド/デュアル/オープンが選択可能
・装置内のさまざな軸に対して、3つのモードで使い分けることによって1種のモータで対応可能
・モーター選定が簡単
・最適な条件設定が可能
・装置調整が簡単
特徴4高分解能エンコーダと最適な電流制御
(1) 脱調レス
負荷に応じて最適な電流制御をおこなうため、高効率な運転ができます。
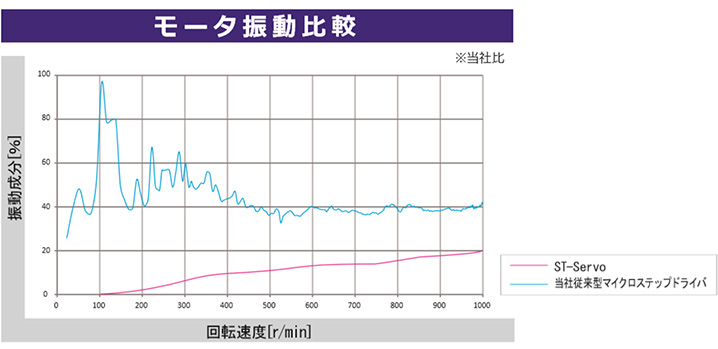
(2) 振動・共振レス
負荷に応じて最適な電流制御をおこなうため、モータの振動・共振が少ない。
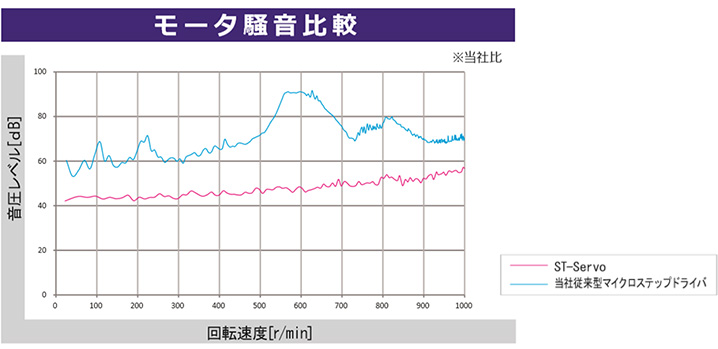
(3) 静音性
エンコーダが高分解能で、負荷に応じて最適な電流制御を行う為、モータの振動が少なく静音を実現。
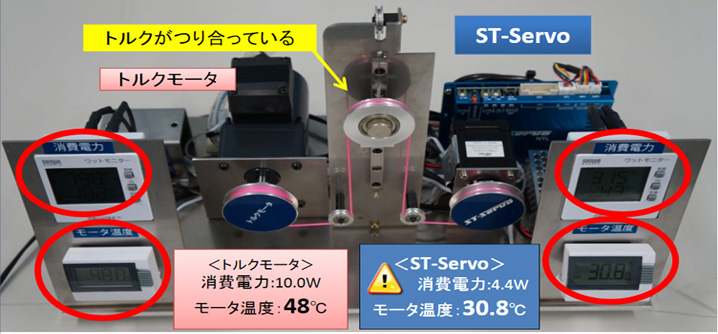
(4) 低発熱 負荷状態により最適に電流を制御しているため、モータの発熱が激減。 |
(5) 省エネ 負荷に応じて最適な電流制御をおこなうため、省エネである。 |
|
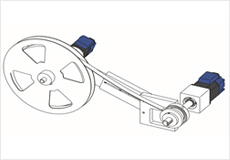
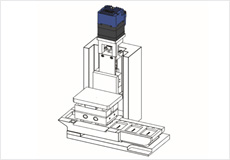
| ACモータ(トルクモータ)とST-servoでロープを引っ張り合い、釣り合う付近で停止させ、30分程度放置。両モータの温度・消費電力を測定 |  |
負荷に応じて電流を制御するST-servoは温度・消費電流とも大幅に低い値を示している。モータサイズも□42と小さい。 |
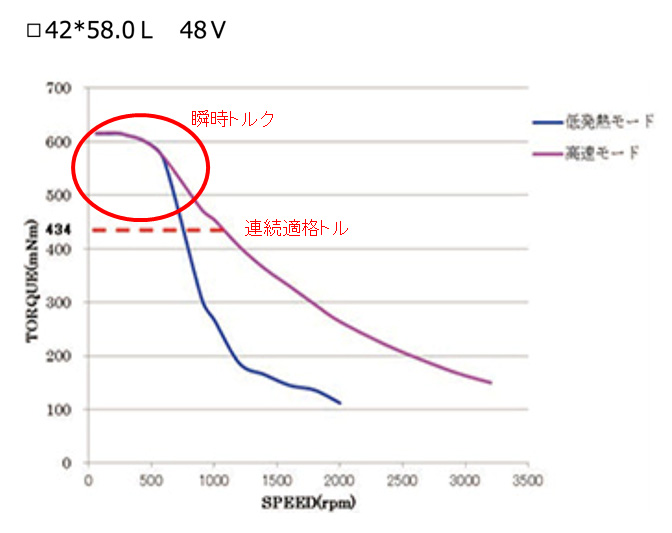
特徴5瞬時電流が150%まで可能なので、高応答が可能
ステッピングモータでも弊社のST−Servoシリーズなら、トルクが不足する起動時・停止時に一定時間瞬時電流(定格電流150%)を使うことができるので、応答遅れをなくすことができます。
特徴6高分解能エンコーダの採用で高応答性を実現
分解能±1パルスで制御で位置決め精度が高い
高分解能・光学式エンコーダを採用し、エンコーダ分解能±1パルスで制御する為、位置決め精度が高い。
| モータサイズ | エンコーダ分解能 | 角度分解能 |
|---|---|---|
| □25・□28 | 9,600ppr | 0.0375度 |
| □42・□56 | 16,000ppr | 0.0225度 |
特徴7位置補正機能(オープンモード)を使うことで停止後のサーボ動作を抑制
エンコーダ付きST-Servoは、オープンループ駆動時でも位置補正機能により「位置偏差ゼロ停止」を実現します。
その結果、一般的なステッピングモータでは避けられない脱調を防ぎつつ、サーボ制御で問題になる移動後の振動をなくします。
| 停止位置精度 (位置補正 無) |
±1.8 | ±1.8 |
|---|---|---|
| 停止位置精度 (位置補正 有) |
±1.8°~ ±0.0225° (360/16000) |
― |
| ハンチング | 無 | 無 |
| 脱調 | 無 | 有 |
特徴8瞬時に制御方式を切り替え可能
各制御モードを外部入力により瞬時に切り替える事が可能。
(位置決め、速度、押し当て(位置)、押し当て(速度)、トルク制御)
特徴9多彩な制御インターフェース
上位システムと接続する、多彩な制御インターフェースを搭載
| 製品 | パルス列指令 | I/O | RS-485 | USBポート |
|---|---|---|---|---|
| ST-Servo CBX | ◯ | ◯ | ◯ | △(※) |
| ST-Servo CMB | × | ◯ | ◯ | △(※) |
| ST-Servo SPX | ◯ | ◯ | ◯ | △(※) |
| ST-Servo SPL | ◯ | ◯ | ◯ | △(※) |
| ST-Servo BSL | ◯ | ◯ | × | ◯ |
※ オプション変換器で接続可能
型番の見方
| セット型番 | 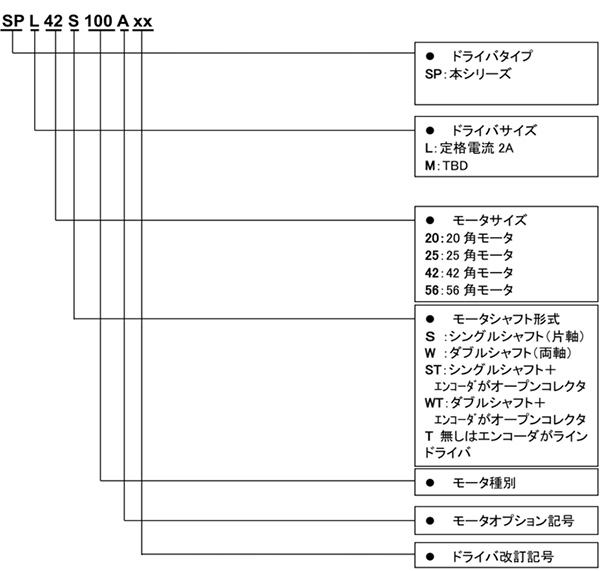 |
ドライバとモータは必ず下表のセット型番で組み合わせてご使用ください。
ドライバとモータの型番が異なる組み合わせでご使用された場合、モータを破損する可能性があります。
| セット型番 | ドライバ型番 | モータ型番 | モータサイズ |
|---|---|---|---|
| SPL20S100A□□ | SPL20X100A□□ | STM20S100A | □20 片軸 |
| SPL25S100A□□ | SPL25X100A□□ | STM25S100A | □25 片軸 |
| SPL25W100A□□ | STM25W100A | □25 両軸 | |
| SPL28S100A□□ | SPL28X100A□□ | STM28S100A | □28 片軸 |
| SPL28W100A□□ | STM28W100A | □28 両軸 | |
| SPL42S100A□□ | SPL42X100A□□ | STM42S100A | □42 片軸 |
| SPL42W100A□□ | STM42W100A | □42 両軸 | |
| SPL42S101A□□ | SPL42X101A□□ | STM42S101A | □42 片軸 |
| SPL42W101A□□ | STM42W101A | □42 両軸 | |
| SPL56S100A□□ | SPL56X100A□□ | STM56S100A | □56 片軸 |
| SPL56W100A□□ | STM56W100A | □56 両軸 |
仕様
| 項目 | 内容 | 備考 |
|---|---|---|
| 入力電源電圧 | DC24V±10% | 定格2A、ピーク3Aの電源をご用意ください |
| 駆動方式 | MOSFET PWM | |
| 制御領域 | 4象限 | |
| PWM 周波数 | 20KHz | |
| 制御方式 | 位置制御 | 指令パルスによる位置決め又は内部デジタル指令 |
| 速度制御 | アナログ指令又は内部デジタル指令 | |
| トルク制御 | アナログ指令又は内部デジタル指令 | |
| 押し当て制御モード | 位置制御、速度制御でのトルク制限制御 | |
| 適応負荷イナーシャ | ロータイナーシャの20倍以下 |
| 位置モード(3モード) | 1) フルタイムクローズモード (常にクローズ制御) 2) デュアルモード (設定速度以下でオープン制御、設定速度以上でクローズド制御) 3) フルタイムオープンモード (常にオープン制御) |
注)内部コマンドで回転指令を与える場合でデュアルモードの切り換え速度はゼロでご使用ください。 更にフルタイムオープンモードは使用できません。 |
|---|---|---|
| パルス列入力 | 1パルス、2パルス、2相パルス 3通りの選択可能 |
|
| エンコーダ分解能 | □20 モ ー タ:6400ppr □25、28 モータ:9600ppr □42、□56 モータ:16000ppr |
|
| 位置精度 | エンコーダ分解能の±1パルス | |
| 指令最大周波数 | 880(Kpps) | 注1 |
| 電子ギア | A/B A=1~10000 B=1~10000 |
ファームウエアバージョン Ver1.07以前はフルタイムクローズモードのみ設定可 Ver1.08 以降より全てのモードで設定可能 |
| フィードフォワード | 0~100(%) | |
| 位置決め完了範囲 | 1~±1000 | |
| フルカウント異常範囲 | 1~±2147483647 | |
| 回転方向 | パルス入力時の回転方向設定 |
注1) 記載している値はドライバとしての最大応答周波数を示しています。
運転が可能な最大周波数は、使用するモータの特性との組み合わせによって異なります。
| 速度制御比 | 350:1 以上 | |
|---|---|---|
| 速度指令 | ・外部 0~±5V 又は 0~±10V ・内部デジタル値(pps) |
注2 |
| 回転方向 | ・デジタル入力(ROT_DIR) ・内部パラメータ |
注2、注3 |
| 起動/停止 | ・デジタル入力(START) ・内部パラメータ |
注2 |
| 加減速機能 | n × MAXrpm × 1ms 内部パラメータ n:0~10 |
n=0の時は加減速なし |
注2)外部と内部の選択はパラメータで設定します。
注3)速度指令がアナログ指令の場合は本入力により回転方向を切り替えることができます。
Vref+がVref-に対しプラスのとき回転方向がOFF(又は’0’)でモータはCWに回転し、回転方向がON(又は’1’)で
モータはCCWに回転します。
| 最大トルク可変範囲 | 0~10000(×0.1%) | 100.0%でモータの定格トルクの1.5倍 |
|---|---|---|
| ループエラー検出時間 | 500~10000(ms) | 速度ループ異常(モータが指令に追従できていないことが原因) |
| トルク可変範囲 | 350:1 以上 | |
|---|---|---|
| トルク指令 | ・外部 0~±5V 又は 0~±10V ・内部デジタル値(%) |
注4 |
| 速度制限 | ・デジタル値(rpm) | 内部パラメータ |
| 指令回転方向 | ・デジタル入力(ROT_DIR) ・内部パラメータ |
注4、注5 |
| 起動/停止 | ・デジタル入力(START) ・内部パラメータ |
注4 |
注4)外部と内部の選択はパラメータで設定します。
注5)トルク指令がアナログ指令の場合は本入力により回転方向を切り替えることができます。
Vref+がVref-に対しプラスのとき回転方向がOFF(又は’0’)でモータはCWに回転し、回転方向がON(又は’1’)で
モータはCCWに回転します。
| 制御形態 | ・位置制御による押し当て ・速度制御による押し当て |
|
|---|---|---|
| 押し当てトルク制限値 | ・外部 0~±5V 又は 0~±10V ・内部デジタル値(%) |
外部指令置は絶対値で処理されます |
| デジタル制限値可変範囲 | 0~1000(×0.1%) | 100.0%でモータの定格トルク |
| サーボオン | 駆動可能入力 | 出荷時は入力OFFでサーボオン |
|---|---|---|
| アラーム出力 | 異常時出力 | 出荷時はアラーム時出力ON |
| デジタル入力信号(非絶縁) | 入力点数7点アサイン及び入力論理が変更可能 | |
|---|---|---|
| 1)サーボオン | ||
| 2)/アラームリセット | ||
| 3)/スタート | 起動/停止用 | |
| 4)/P制御 | 比例制御 | |
| 5)制御モード切換え | 0.位置制御 ⇔ /速度制御 1.位置制御 ⇔ /トルク制御 2.位置制御 ⇔ /押し当て制御(位置) 3.位置制御 ⇔ /押し当て制御(速度) 4.速度制御 ⇔ /トルク制御 5.速度制御 ⇔ /押し当て制御(速度) 各モードはパラメータで選択 |
|
| 6)方向 | 速度/トルク制御時の回方向入力 “H”で CW 回転、”L”でCCW回転 |
|
| 7)/偏差カウンタクリア | ||
| 8)予備入力1点 | ||
| アナログ入力(非絶縁) | 速度指令/トルク指令/押し当てトルク制限値入力 | 0~±5V 又は 0~±10V |
| デジタル出力信号(非絶縁) | 出力点数3点アサイン及び出力論理は変更可能 | |
| 1)/インポジション | インポジション(位置制御時) | |
| 2)/ZSP | ゼロ速度(速度制御時) モータ停止時に出力 |
|
| 3)アラーム | アラーム(論理は変更可能) | |
| 4)/トルクリミット | トルク制限中(トルク制御又は押し当て制御時) | |
| 5)/VCMP | 速度到達(速度制御時) 回転数が指令値の95%以上に達したことを示す |
|
| LED 表示機能 | POW(緑色) | 電源が投入され初期化が終わったことを示すパラメータの変更により電源再投入を要求するときは点滅します |
| ALM(赤色) | ドライバが異常であることを示す アラーム内容は点滅回数で判別 |
|
| アナログモニタ出力 | モータ速度、指令速度、指令トルク、モータトルク、位置偏差 | アナログ出力 0Vを基準とする |
| RS485 | ノード数:254 半二重、調歩同期式 ボーレート:9600、19200、38400、57600、115200 データサイズ:7bit、8bit パリティ:無し、偶数、奇数 ストップビット:1bit |
SW1-1がONの設定で本製品の電源を投入されたとき、通信設定のみ下記の初期状態で起動します。 ボーレート:38400 データ長:8bit パリティ:無し ストップビット:1bit プロトコル:MODBUS ASCII アドレスID:0 |
| 設定機能 | ・基板内トリマーで設定 速度ループゲイン調整 ・RS485 ポートより設定 1.位置ループゲイン 2.速度ループベース比例ゲイン 3.速度ループ積分時定数 4.速度フィードバックゲイン 5.微分補償ゲイン 6.フィードフォアード(%) 7.P制御時の比例ゲイン 8.その他の各パラメータ |
|
| アラームの種類 | ループエラー、フルカウント、過速度、過電圧、ゲイン調整不良、EEPROMエラー、位置補正異常 | |
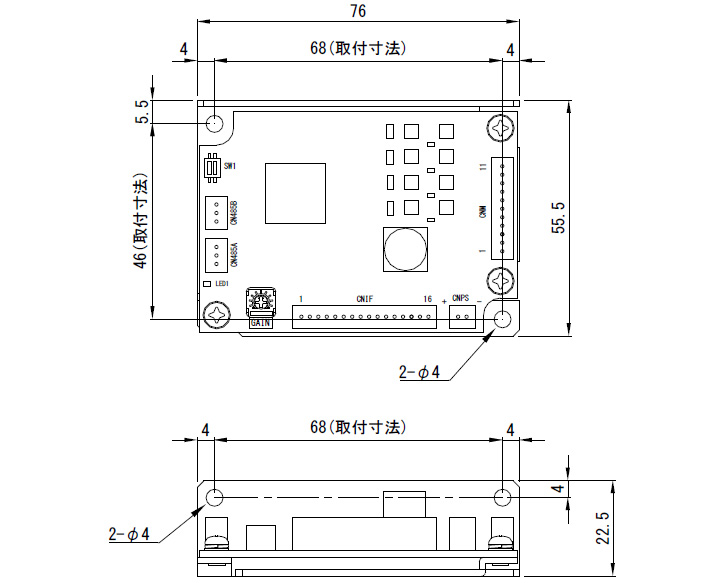
| 外形 | W76×D55.5×H22.5 | |
| 重量 | 58g | コネクタソケットは含まず |
| 動作温度・湿度 | 0~50℃、85%RH以下 | 結露なきこと |
| 保存温度度 | -20~85℃、85%以下 | 結露なきこと |
| 雰囲気 | 腐食性ガスのないこと | |
回転速度 ― トルクカーブ
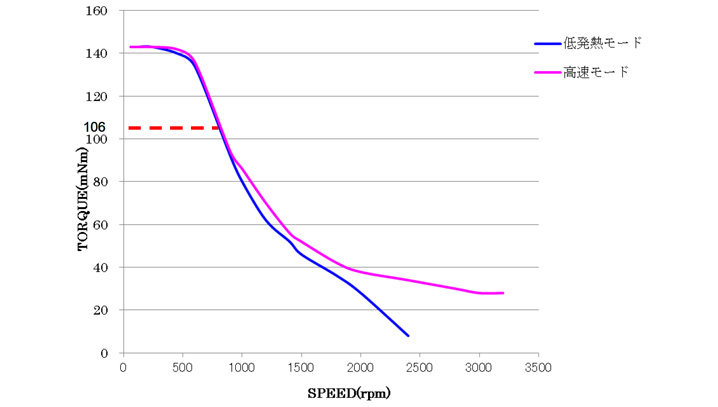
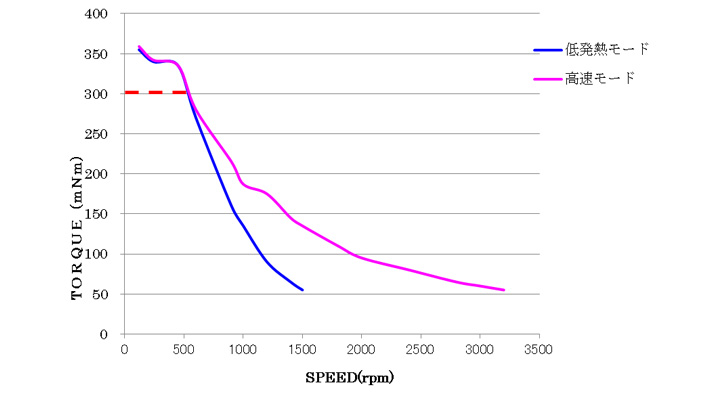
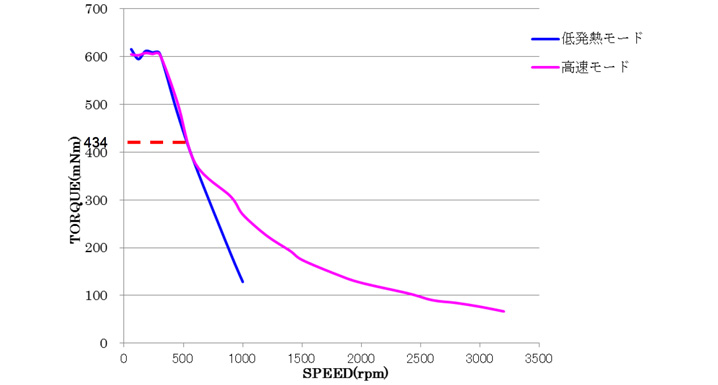
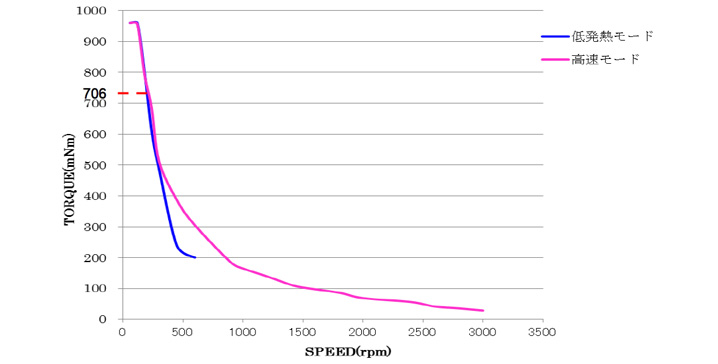
ー ー ー ー ー 連続定格トルク
注)連続定格トルクを超えるトルクは瞬時トルクとなります。
尚、トルク制御及び押し当て制御時の最大トルクは連続定格トルクとなります。
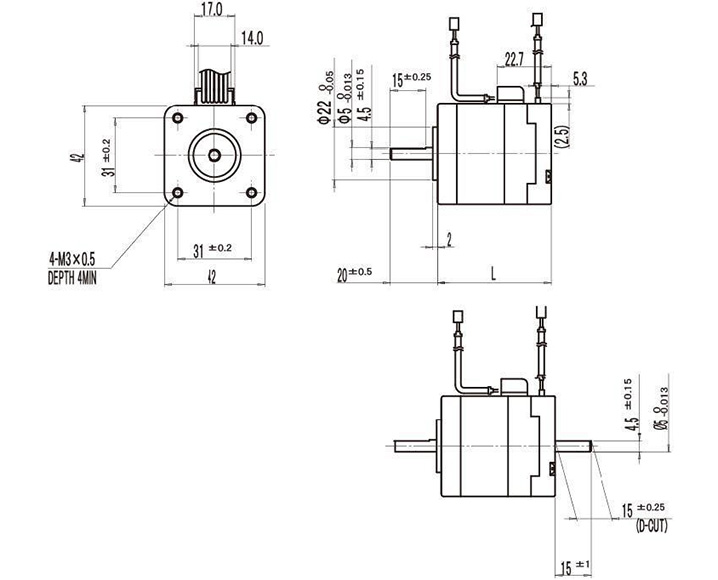
外形図
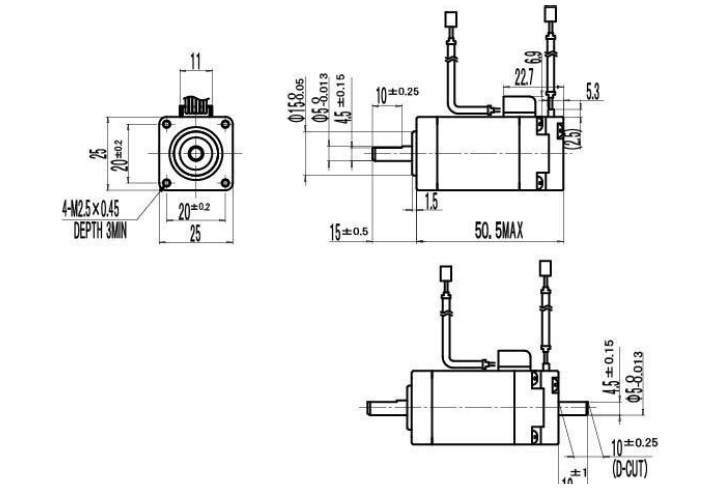
外形図 - モータ
| □25 | 型式:STM25S(W)100A,STM28S(W)100A |
| □28 |
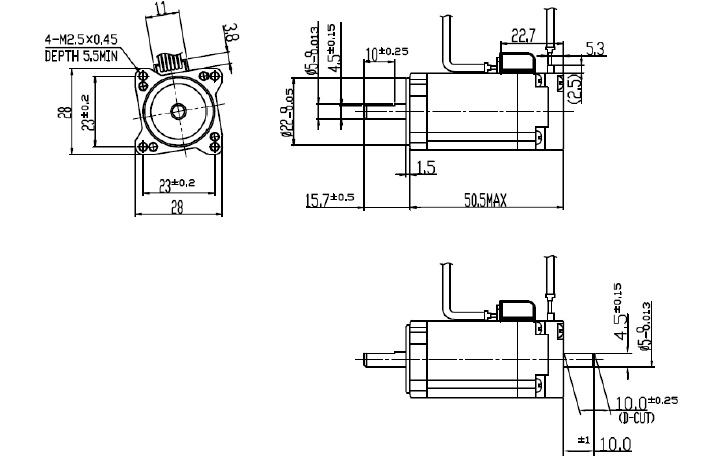
| モータ型式 | ローターイナーシャ | 質量 |
|---|---|---|
| STM25S(W)100A | 4gcm2 REF. | 120g REF. |
| STM28S(W)101A | 4gcm2 REF. | 120g REF. |
| □42 | 型式:STM42S(W)100A,STM42S(W)101A |
| モータ型式 | L | ローターイナーシャ | 質量 |
|---|---|---|---|
| STM42S(W)100A | 48 | 50gcm2 REF | 270g REF. |
| STM42S(W)101A | 58 | 75gcm2 REF | 370g REF. |
| □56 | 型式:STM56S(W)100A |
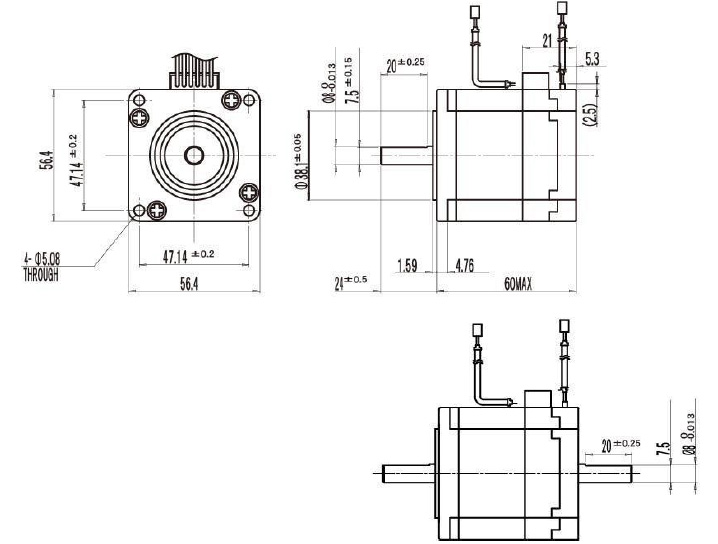
| モータ型式 | ローターイナーシャ | 質量 |
|---|---|---|
| STM56S(W)100A | 180gcm2 REF. | 620g REF. |
オプションアダプタ (別売)
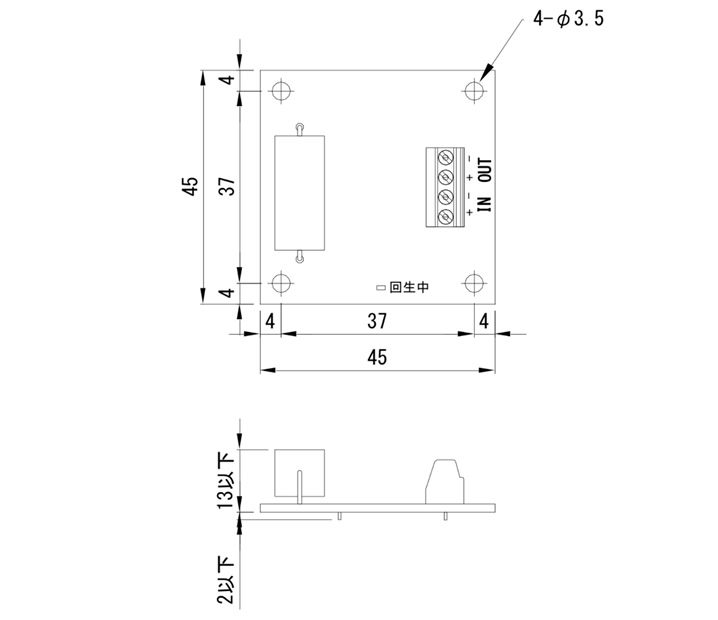
製品の特長
- 本製品は ST-ServoBSL、ST-ServoCMB 及び ST-ServoSPL 用の回生吸収ユニット基板です。
本製品を+24V 電源又は+48V 電源と上記ドライバ間に接続することによりドライバからの回生エネルギーを抵抗で放電させて電源電圧の上昇を防ぐことができます。 - DIN レール取り付け用のオプションケースもご用意しております。
- 回生ユニットは ST-ServoCMB 又は ST-ServoSPL の場合は ST-RG3-24V、
ST-ServoBSL の場合は ST-RG3-48V の2種類がございますので基板上の捺印をご確認下さい。
インターフェイス
<CNPS(電源用)>
| No. | 信号名 | 内容 | 備考 |
|---|---|---|---|
| 1 | +24V | 主電源プラス | +24V±10%、定格 2A,ピーク 3A |
| 2 | 0V | 主電源0V |
注1)コネクタCNPSの近くにジャンパポストが立っているためソケットを挿入の際は怪我をしないよう十分注意して下さい。
注2)ピーク電流による電圧降下を考慮してドライバ入力部で規定電圧になるように線径及び長さの線材を選択して下さい。
注3)本ドライバは突入電流抑制回路を内蔵しておりません。突入電流はご使用される電源の特性や配線インピーダンスに
依存しますので実機で確認して下さい。その際の突入電流が10ms以上10Aを超えないように対策して下さい。
<CNIF(インターフェース用)>
| No. | 信号名 | 内容 | I/O | 備考 |
|---|---|---|---|---|
| 1 | IN1 | デジタル入力1 | IN | 出荷時はサーボ |
| 2 | IN2 | デジタル入力2 | IN | 出荷時は起動/停止(速度、トルク制御時用) |
| 3 | IN3 | デジタル入力3 | IN | 出荷は回転方向(CW/CCW)
(速度、トルク制御時用) |
| 4 | IN4 | デジタル入力4 | IN | 出荷時はアラームリセット |
| 5 | IN5 | デジタル入力5 | IN | 出荷時はモード切り換え |
| 6 | IN6/P1 | デジタル入力6 | IN | 指令パルスP1入力を兼ねる |
| 7 | IN7/P2 | デジタル入力7 | IN | 指令パルスP2入力を兼ねる |
| 8 | OUT1 | デジタル出力1 | OUT | 出荷時はインポジション(位置制御時) ゼロ速度(速度制御時) |
| 9 | OUT2 | デジタル出力2 | OUT | 出荷時はアラーム |
| 10 | OUT3 | デジタル出力3 | OUT | 出荷時はトルクリミット |
| 11 | GND | 入出力のシグナルグランド | - | |
| 12 | +5V | アナログ指令用電源 | OUT | 最大 10mA |
| 13 | Vref+ | アナログ指令プラス側 | IN | 入力インピーダンス 100kΩ |
| 14 | Vref- | アナログ指令マイナス側 | IN | |
| 15 | AMON | アナログモニタ出力 | OUT | |
| 16 | AGND | モニタ用 GND | - |
注意)本デジタル入出力は非絶縁となっております。
ケーブル長が1mを超える場合は上位側でフォトカプラによる絶縁処理を行って下さい。
<CNM(モータ用)>
| No. | 信号名 | 内容 | |
|---|---|---|---|
| 1 | A+ | エンコーダA相+ | 注1 |
| 2 | A- | エンコーダA相- | |
| 3 | B+ | エンコーダB相+ | |
| 4 | B- | エンコーダB相- | 注1 |
| 5 | +5V | エンコーダ用電源+5V | |
| 6 | GND | エンコーダ用電源GND | |
| 7 | FG | シールド | 注2 |
| 8 | A | モータ A相 | |
| 9 | /A | モータ/A相 | |
| 10 | B | モータ B相 | |
| 11 | /B | モータ/B相 |
注1)オープンコレクタタイプのエンコーダはここに接続してください。
注2)本ドライバの付属ケーブルはシールド処理を行っておりません。
1mを超えるケーブルをご使用される場合は必ずシールド付きケーブルを使用してください。
<CN485A,B(RS485用)>
| No. | 信号名 | I/O | 内容 |
|---|---|---|---|
| 1 | Sig-A | IN/OUT | 信号線A |
| 2 | Sig-B | IN/OUT | 信号線B |
| 3 | SG | - | シグナルグランド |
注意)ケーブル長が50cmを超える場合はSig-AとSig-Bを撚り線にする又は3芯シールドケーブルを使用して下さい。
<適合ハウジングコネクタとコンタクトの型式>
| 記号 | 用 途 | 型式 | 適用線材 | メーカー |
|---|---|---|---|---|
| CNPS | 電源用 | ハウジング:PAP-02V-S | AWG#26~22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 | ||||
| CNIF | インターフェース用 | ハウジング:PAP-16V-S | AWG#26~22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 | ||||
| CN485 | RS485 用 | ハウジング:PAP-03V-S | AWG#26~22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 | ||||
| CNM | モータエンコーダ用 | ハウジング:PAP-11V-S | AWG#26~22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 |