


ST-Servo技術製品
モーションコントロール.comの製品情報は、クローズドループステッピングサーボシステムのST-Servoシリーズになります。また、各種カスタマイズ対応を致します。
| <ST-Servo シリーズ> | <2相ステッピングモータ用 マイクロステップドライバ> |
<DCサーボドライバ> | ||
クローズドループステッピングサーボシステム - ST-Servo BSL

ST-Servo BSL
高分解能エンコーダを採用したクローズドループステッピングサーボシステムです。超低発熱、極省エネルギー、低振動の小容量、高出力なコンポーネントです。
位置制御、速度制御、トルク制御、押し当て制御ができ、低速域での高トルク・回転安定性に優れます。
特徴
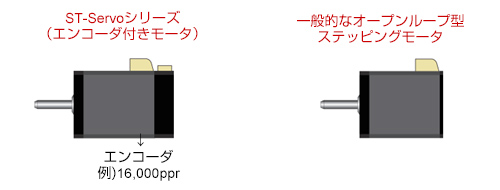
特徴1クローズドループ型ステッピングシステム
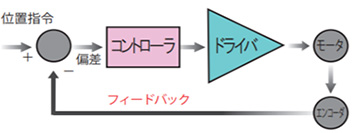
当社コア技術であるサーボ制御技術でエンコーダ付ステッピングモータをクローズドループ制御する事で、ステッピングモータの決定である脱調、乱調、共振、騒音現象を大幅抑制。これまでのステッピングモータの領域を超えるクローズドループ型ステッピングシステム。
高額なACサーボドライバと同じように、位置制御、速度制御、トルク制御、押し当て制御(位置、速度)が可能。
一般的なオープンループ型ステッピングシステム
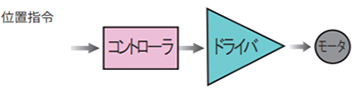
弊社 クローズドループ型ステッピングシステム
特徴2トルク制御、押し当て制御(位置、速度)も可能
位置制御、速度制御、押し当て制御、トルク制御ができます。それぞれの制御モードへの切り替えも瞬時にできますのでお客様の装置に最適の制御ができます。
トルク制御
押し当て制御(位置)
押し当て制御(速度)
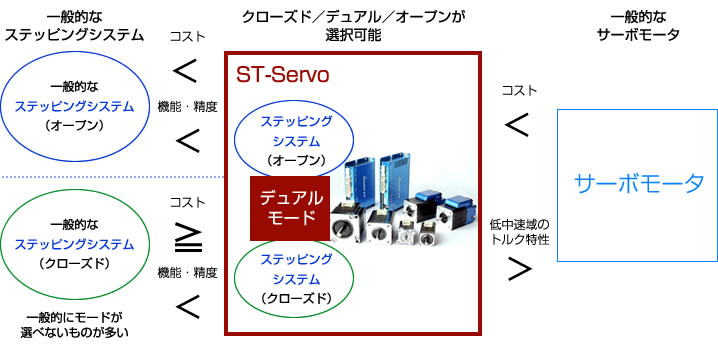
特徴3クローズド/デュアル/オープンが選択可能
クローズド/デュアル/オープンが選択可能
・装置内のさまざな軸に対して、3つのモードで使い分けることによって1種のモータで対応可能
・モーター選定が簡単
・最適な条件設定が可能 装置調整が簡単 制御モード別比較表 ≫
特徴4高分解能エンコーダと最適な電流制御
(1) 脱調レス
負荷に応じて最適な電流制御をおこなうため、高効率な運転ができます。
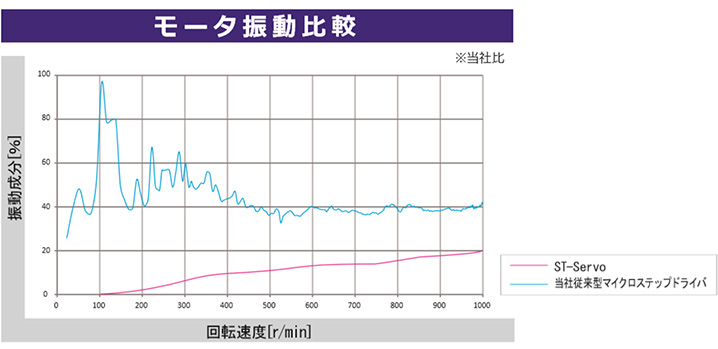
(2) 振動・共振レス
負荷に応じて最適な電流制御をおこなうため、モータの振動・共振が少ない。
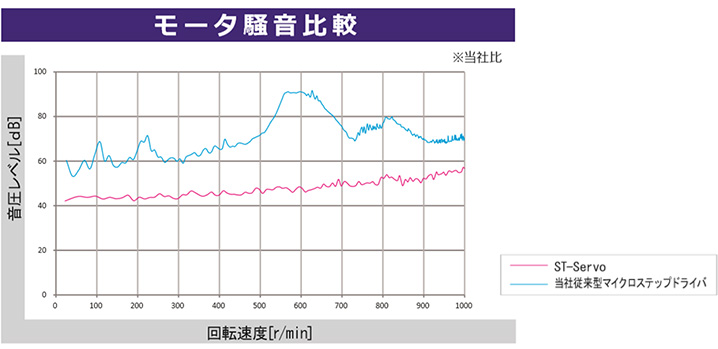
(3) 静音性
エンコーダが高分解能で、負荷に応じて最適な電流制御を行う為、モータの振動が少なく静音を実現。
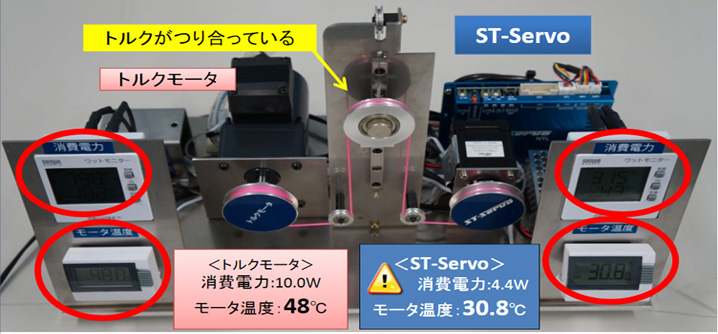
(4) 低発熱 負荷状態により最適に電流を制御しているため、モータの発熱が激減。 |
(5) 省エネ 負荷に応じて最適な電流制御をおこなうため、省エネである。 |
|
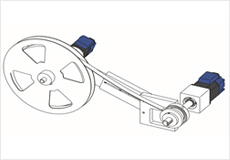
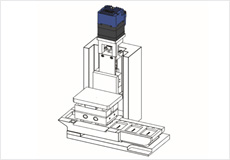
| ACモータ(トルクモータ)とST-servoでロープを引っ張り合い、釣り合う付近で停止させ、30分程度放置。両モータの温度・消費電力を測定 |  |
負荷に応じて電流を制御するST-servoは温度・消費電流とも大幅に低い値を示している。モータサイズも□42と小さい。 |
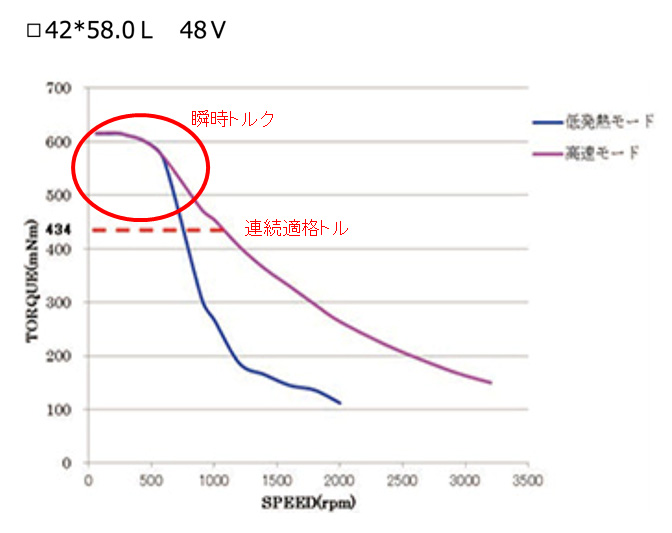
特徴5瞬時トルクが150%まで可能なので、高応答が可能
ステッピングモータでも弊社のST−Servoシリーズなら、トルクが不足する起動時・停止時に一定時間瞬時トルク(定格トルク150%)を使うことができるので、応答遅れをなくすことができます。
デュアル/クローズドモードで、定格トルクの150%(瞬時トルク)が可能
特徴6高分解能エンコーダの採用で高応答性を実現
分解能±1パルスで制御で位置決め精度が高い
高分解能・光学式エンコーダを採用し、エンコーダ分解能±1パルスで制御する為、位置偏差追従性が高い。
| モータサイズ | エンコーダ分解能 | 角度分解能 |
|---|---|---|
| □25・□28 | 9,600ppr | 0.0375度 |
| □42・□56 | 16,000ppr | 0.0225度 |
特徴7位置補正機能(オープンモード)を使う事で位置偏差ゼロ停止が可能。
オープンループモードでも、位置補正機能を使う事で位置偏差ゼロ停止が可能。
| 停止位置精度 (位置補正 無) |
±1.8 | ±1.8 |
|---|---|---|
| 停止位置精度 (位置補正 有) |
±1.8°~ ±0.0225° (360/16000) |
― |
| ハンチング | 無 | 無 |
| 脱調 | 無 | 有 |
特徴8位置決め整定時間短縮
デュアルモード(設定速度以下でオープンループ制御に自動切り替え)、オープンモードを選択することで、モータのハンチングを抑える事でショートピッチ送りでのタクトタイムを短縮する事が可能
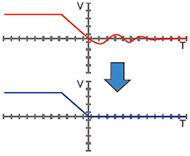
T:時間 V:速度
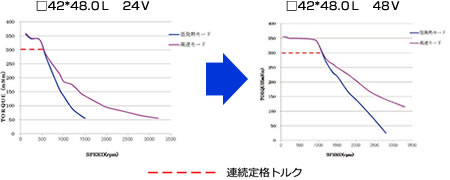
特徴9高速域のトルク特性が高い
DC24V,DC48V自動認識 | 入力電源電圧
DC24V,DC48V共用。
DC48Vを使用する事で高速域のトルク特性が向上。
特徴10瞬時に制御方式を切り替え可能
各制御モードを外部入力により瞬時に切り替える事が可能。
(位置決め、速度、押し当て(位置)、押し当て(速度)、トルク制御)
特徴11多彩な制御インターフェース
上位システムと接続する、多彩な制御インターフェースを搭載
| 製品 | パルス列指令 | I/O | RS-485 | USBポート |
|---|---|---|---|---|
| ST-Servo CBX | ◯ | ◯ | ◯ | △(※) |
| ST-Servo CMB | × | ◯ | ◯ | △(※) |
| ST-Servo SPX | ◯ | ◯ | ◯ | △(※) |
| ST-Servo SPL | ◯ | ◯ | ◯ | △(※) |
| ST-Servo BSL | ◯ | ◯ | × | ◯ |
※ オプション変換器で接続可能
型番の見方
| セット型番 | 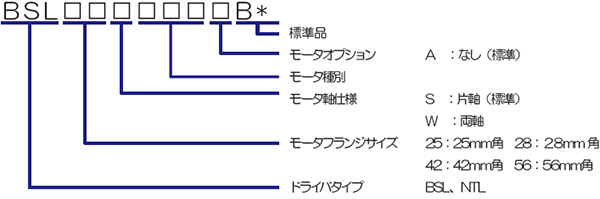 |
|
| ドライバ型番 | 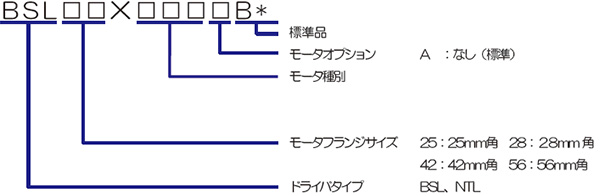 |
|
| モータ型番 | 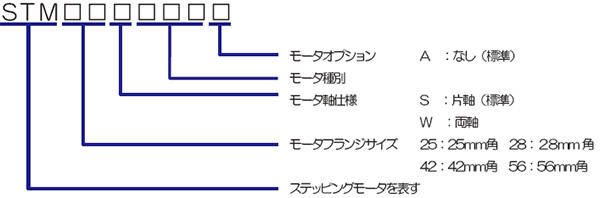 |
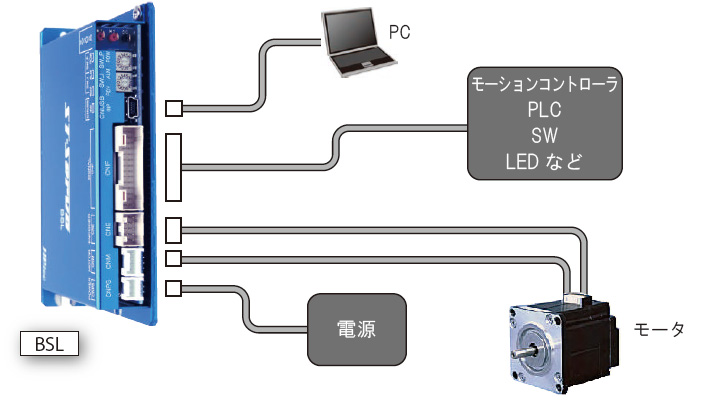
システム構成
仕様
| 項目 | BSL | |
|---|---|---|
| 入力電源電圧 | DC24V DC48V | |
| 制御モード | 位置・速度・トルク・押し当て | |
| 定格出力 | 2.0Ao-p | |
| 最大出力電流 | 3.0 o-p | |
| 対応モータサイズ (mm) | □25、□28、□42、□56 | |
| エンコーダパルス数 | 6400ppr、 9600ppr、 16000ppr ( 接続モータによる) | |
| 汎用入力信号 | 6 | |
| 汎用出力信号 | 4 | |
| メカニカル入力信号 | なし | |
| 制御指令方式 | パルス列 (1/2/AB) | 〇 |
| パラメータ | 〇 | |
| 内部プログラム | 〇(32ステップ) | |
| USB | 〇 | |
| RS485 | - | |
| アナログ信号 | 〇 | |
| USB 通信 | USB2.0 (WINDOWS 仮想 COM ポート ) | |
| RS485 通信 | - | |
| 表示機能 | 電源 LED ( 緑色 ) アラーム LED ( 赤色 ) サーボレディ ( 緑色 ) インポジション ( 緑色 ) |
|
| アラームの種類 | ループ異常 フルカウント 過速度 ゲイン調整不良 過電圧 EEROM 異常 |
|
| 動作温度・湿度 | 0~50℃、85%RH以下(結露なきこと) | |
| 保存温度・湿度 | -20~85℃、85%以下(結露なきこと) | |
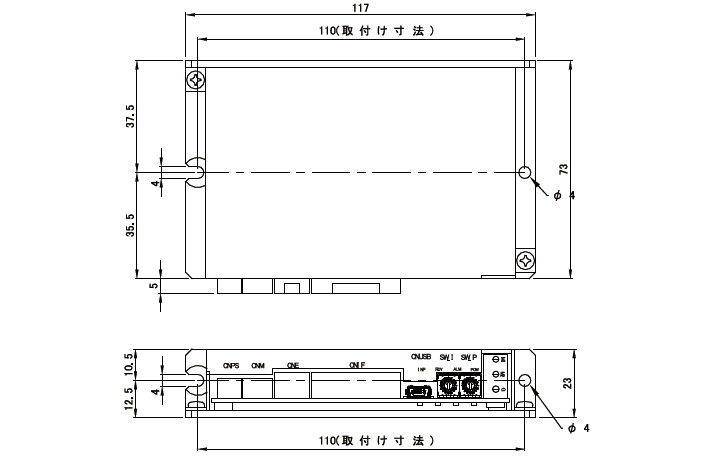
| 外形 | W117xD73xH23 | |
| 重量 | 150g | |
| 付属品 | モータ用ケーブル・エンコーダケーブル 1m(ノーマル) ハウジング/コンタクトピン(CNPS用、CNIF用) |
|
| サイズ (mm) | □25×50.5 | □28×50.5 | □42×48.0 |
|---|---|---|---|
| モータ型式 | STM25S100A(片軸) STM25W100A(両軸) |
STM28S100A(片軸) STM28W100A(両軸) |
STM42S100A(片軸) STM42W100A(両軸) |
| セット型式 | BSL25S100AB*(片軸) BSL25W100AB*( 両軸 ) |
BSL28S100AB*(片軸) BSL28W100AB*(両軸) |
BSL42S100AB*(片軸) BSL42W100AB*(両軸) |
| ドライバ型式 | BSL25X100AB* | BSL28X100AB* | BSL42X100AB* |
| 入力電源電圧 | DC24V/DC48V ±10% | ||
| 連続定格トルク(mN・m) | 106 | 106 | 300 |
| ロータイナーシャ(g・㎠) | 4 | 4 | 50 |
| エンコーダ分解能 | 9,600 | 9,600 | 16,000 |
| 質量 (g) | 120 | 120 | 270 |
| サイズ(mm) | □42x58.0 | □56x60.0 |
|---|---|---|
| モータ型式 | STM42S101A(片軸) STM42W101A(両軸) |
STM56S100A(片軸) STM56W100A(両軸) |
| セット型式 | BSL42S101AB*(片軸) BSL42W101AB*(両軸) |
BSL56S100AB*(片軸) BSL56W100AB*(両軸) |
| ドライバ型式 | BSL42X101AB* | BSL56X100AB* |
| 入力電源電圧 | DC24V/DC48V ±10% | |
| 連続定格トルク(mN・m) | 434 | 706 |
| エンコーダ分解能 | 16,000 | 16,000 |
| 質量 (g) | 370 | 620 |
注意:NTL のセット型式、ドライバ型式は上表「BSL」の部分を置き換えたものとなります。
| 品名 | 型式 | ケーブル長 (m) |
|---|---|---|
| □25 モータ モータ用ケーブル | C004039-□.0 | 標準 : 1 オプション : 3、5、10 |
| □42 モータ モータ用ケーブル | C004035-□.0 | 標準 : 1 オプション : 3、5、10 |
| □56 モータ モータ用ケーブル | C004036-□.0 | 標準 : 1 オプション : 3、5、10 |
| □25 モータ エンコーダ用ケーブル | C008025-□.0 | 標準 : 1 オプション : 3、5、10 |
| □4256 モータ エンコーダ用ケーブル | C008024-□.0 | 標準 : 1 オプション : 3、5、10 |
| 電源用ケーブル | C003036-1 | 1 |
| BSL 用 I/F ケーブル | C028001-1 | 1 |
| NTL 用 I/F ケーブル | C024003-1 | 1 |
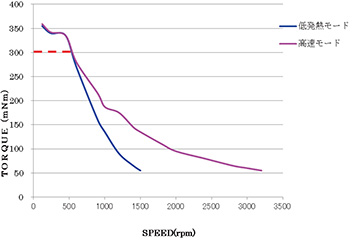
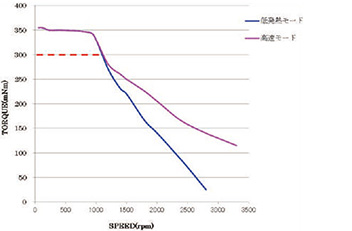
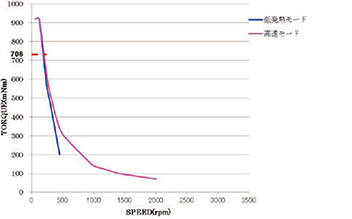
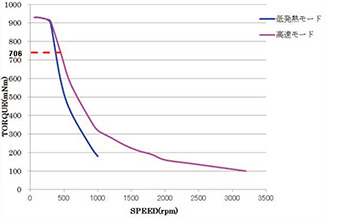
回転速度 ― トルクカーブ
□25、□28*50.5L 24V
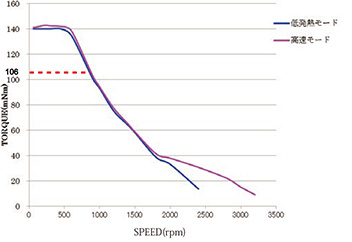
□25、□28*50.5L 48V
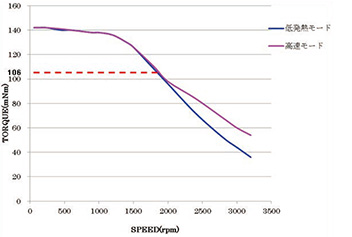
注)連続定格トルクを超えるトルクは瞬時トルクとなります。
尚、トルク制御及び押し当て制御時の最大トルクは連続定格トルク
となります。
ー ー ー ー ー 連続定格トルク
□42*48.0L 24V
□42*48.0L 48V
□42*58.0L 24V
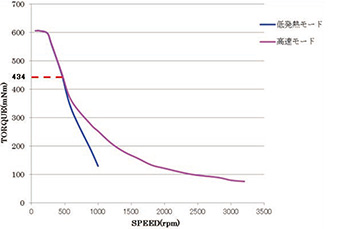
□42*58.0L 48V
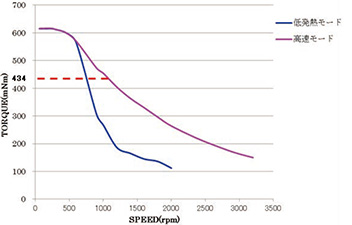
注)連続定格トルクを超えるトルクは瞬時トルクとなります。
尚、トルク制御及び押し当て制御時の最大トルクは連続定格トルク
となります。
ー ー ー ー ー 連続定格トルク
□56*60.0L 24V
□56*60.0L 48V
外形図
外形図 - モータ
| 25 | 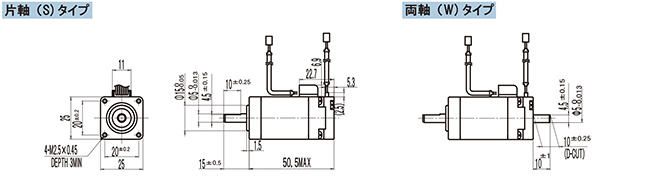 |
|
| 28 | 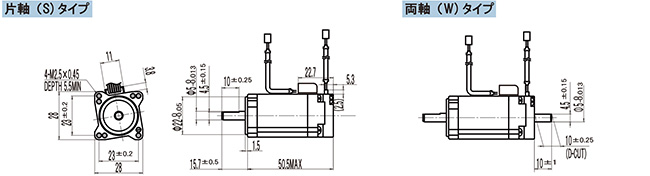 |
|
| 42 | 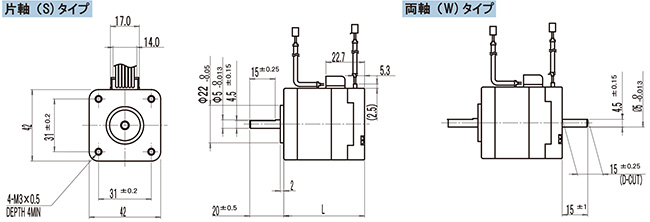 |
|
| 56 | 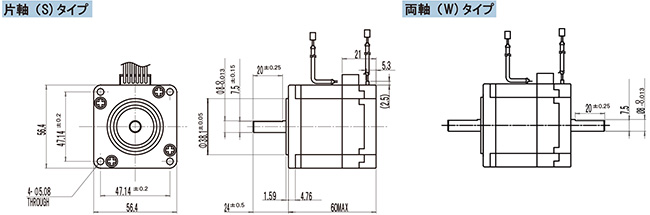 |
オプションアダプタ (別売)
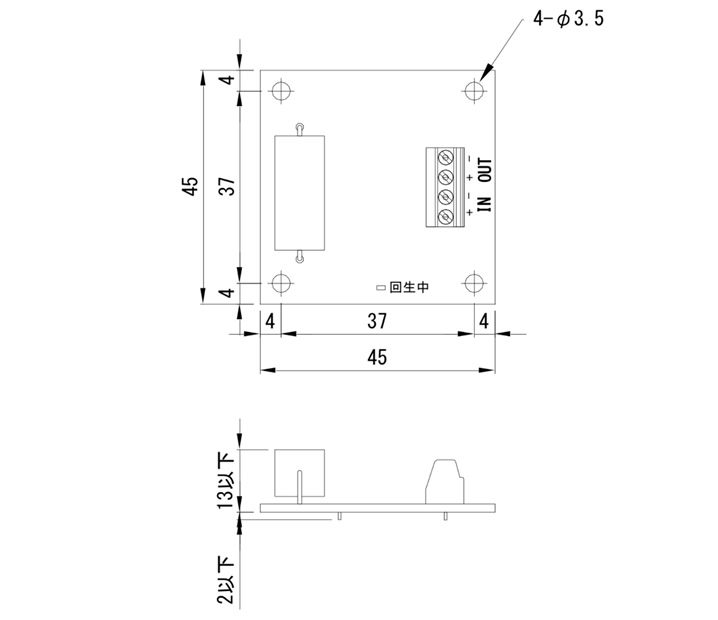
製品の特長
- 本製品は ST-ServoBSL、ST-ServoCMB 及び ST-ServoSPL 用の回生吸収ユニット基板です。
本製品を+24V 電源又は+48V 電源と上記ドライバ間に接続することによりドライバからの回生エネルギーを抵抗で放電させて電源電圧の上昇を防ぐことができます。 - DIN レール取り付け用のオプションケースもご用意しております。
- 回生ユニットは ST-ServoCMB 又は ST-ServoSPL の場合は ST-RG3-24V、
ST-ServoBSL の場合は ST-RG3-48V の2種類がございますので基板上の捺印をご確認下さい。
インターフェイス

●共通
<モニタ端子(5V 基準)>
| 端子 | 内容(パラメータにより選択) |
|---|---|
| M1 | 指令速度、モータ速度、指令トルク |
| M2 | モータ速度、トルク、位置偏差、インポジション |
| G | GND |
<CNM(モータ用)>
| No. | 信号名 | 内容 |
|---|---|---|
| 1 | A | モータ A 相 |
| 2 | /A | モータ /A 相 |
| 3 | B | モータ B 相 |
| 4 | /B | モータ /B 相 |
<CNUSB(USB 用)>
| No. | 信号名 | IN/OUT | 内容 |
|---|---|---|---|
| 1 | +5V | IN | PC からの BUS POWER |
| 2 | D- | IN/OUT | データライン- |
| 3 | D+ | IN/OUT | データライン+ |
| 4 | |||
| 5 | GND | IN | シグナルグランド |
<CNPS(電源用)>
| No. | 信号名 | 内容 | 備考 |
|---|---|---|---|
| 1 | +24V 又は+48V | 主電源プラス | +24V±10% +48V±10% |
| 2 | 0V | 主電源 0V | |
| 3 | FG | フレームグランド | 必ず配線してください |
<CNE(エンコーダ用)>
| No. | 信号名 | IN/OUT | 内容 |
|---|---|---|---|
| 1 | +5V | OUT | エンコーダ用電源+5V |
| 2 | GND | OUT | エンコーダ用電源 GND |
| 3 | A+ | IN | A 相+ |
| 4 | A- | IN | A 相- |
| 5 | B+ | IN | B 相+ |
| 6 | B- | IN | B 相- |
| 7 | Z+ | IN | Z 相+ |
| 8 | Z- | IN | Z 相- |
| 9 | NC | ||
| 10 | FG | シールド(注) |
注)本ドライバの付属ケーブルはシールド処理を行っておりません。
1mを超えるケーブルをご使用される場合は、シールド付きケーブルを使用してください。
<ゲインスイッチ>
| SW | 内容 | 備考 |
|---|---|---|
| SW_P | 速度ループの比例ゲイン | 0-F で負荷のイナーシャに合わせます |
| SW_I | 速度ループの積分時定数 | 0-F で負荷の剛性に合わせます |
| LED名 | 機能 | LED |
|---|---|---|
| POW | ・電源が投入されたことを示します。 ・電源の再投入が必要なパラメータを書き換えた場合に点滅します。 |
緑 |
| ALM | ・ドライバが異常であることを示します。 点滅回数によりアラームの種類が識別できるようになっています。 アラームの内容はアラーム機能をご参照ください。 ・電源の再投入が必要なパラメータを書き換えた場合に点灯します。 |
赤 |
| RDY | ・電源投入後ドライバの初期化が終了したことを示す。 ・力率検知がコマンド入力により動作設定されている場合は点滅します。 ・位置制御のときはインポジションゾーンにあることを示す。 |
緑 |
| INP | ・速度制御のときは目標速度に到達したことを示す。 ・押し当て制御のときはトルクリミットに達したことを示す。 |
緑 |
<CNIF(I / F 用)>
| No. | 信号名 | 内容 | IN/OUT | 備考 |
|---|---|---|---|---|
| 1 | P1+ | 指令CW パルス 又は指令パルス 又はB相 |
IN | 2パルス、1パルス、2相パルス選択可能 出荷時は2パルス(CW/CCW パルス) |
| 2 | P1- | IN | ||
| 3 | P2+ | 指令CCW パルス 又は指令方向 又はA相 |
IN | |
| 4 | P2- | IN | ||
| 5 | COM+ | I/O 用電源+24V | IN | 絶縁用電源プラス(+24V±10%) |
| 6 | COM | I/O 用電源0V | IN | 絶縁用電源0V |
| 7 | IN1 | デジタル入力1 | IN | 出荷時はサーボオン |
| 8 | IN2 | デジタル入力2 | IN | 出荷時はアラームリセット |
| 9 | IN3 | デジタル入力3 | IN | 出荷時は起動/停止(速度、トルク制御時用) |
| 10 | IN4 | デジタル入力4 | IN | 出荷時はP 動作 |
| 11 | IN5 | デジタル入力5 | IN | 出荷時は制御モード切替(モード0/ モード1) |
| 12 | IN6 | デジタル入力6 | IN | 出荷時は回転方向(CW/CCW)(速度、トルク制御時用) |
| 13 | +10Vout | 速度指令用電源 | OUT | ボリュームで速度指令を設定するときに使用 |
| 14 | Verf+ | 速度、トルク指令 トルク制限値プラス |
IN | 0~ ±5V又は0~ ±10V |
| 15 | Verf- | 上記指令用マイナス | IN | 内部制御GND と同電位 |
| 16 | OUT1 | デジタル出力1 | OUT | 出荷時はインポジション(位置制御時) ゼロ速度(速度制御時) |
| 17 | OUT2 | デジタル出力2 | OUT | 出荷時はアラーム |
| 18 | OUT3 | デジタル出力3 | OUT | 出荷時は押し当て制御時のトルクリミット |
| 19 | OUT4 | デジタル出力4 | OUT | 出荷時は速度到達(速度制御時) |
| 20 | BRAKE+ | ブレーキ解除出力+ | OUT | +24V(5番ピンと同電位) |
| 21 | BRAKE- | ブレーキ解除出力- | OUT | 500mAmax |
| 22 | ECA+ | エンコーダA 相 | OUT | 作動出力 |
| 23 | ECA- | OUT | ||
| 24 | ECB+ | エンコーダB 相 | OUT | 作動出力 |
| 25 | ECB- | OUT | ||
| 26 | ECZ+ | エンコーダZ 相 | OUT | 作動出力 |
| 27 | ECZ- | OUT | ||
| 28 | SG | シグナルグランド | 内部シグナルGND と同電位 |